Dettagli
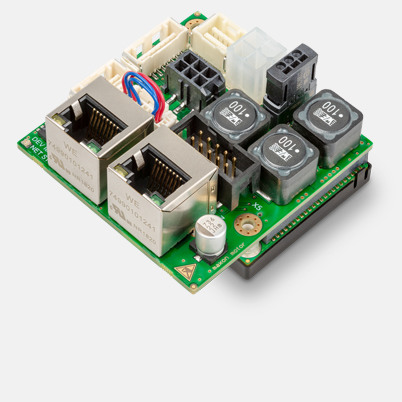
EPOS4 Compact 50/5 EtherCAT, comando di posizionamento digitale, 5 A, 10 - 50 VDC
Codice articolo 628094
| Fasce di prezzo | Quantità | Prezzo unitario |
|---|---|---|
| Prezzi al netto dell'IVA e dei costi di spedizione | 1-4 | € 643,56 |
| 5-19 | € 566,51 | |
| 20-49 | € 486,83 | |
| a partire da 50 | Su richiesta |
Specifiche
| Prodotto | |
| Peso | 76 g |
| Motore | |
| Motori DC fino a | 250 W |
| Motori EC fino a | 250 W |
| Sensor | |
| Senza sensori (motori DC) | Sì |
| Encoder incrementale digitale (2 canali, single ended) | Sì |
| Encoder incrementale digitale (2 canali, differenziale) | Sì |
| Encoder incrementale digitale (3 canali, differenziale) | Sì |
| Sensori Hall digitali (motori EC) | Sì |
| SSI Encoder assoluto | Sì |
| Encoder incrementale analogico (2 canali, differenziale) | Sì |
| Variabili di controllo | |
| Regolatore di corrente | Sì (coppia) |
| Regolatore di velocità (closed loop) | Sì |
| Regolatore di posizione | Sì |
| Dati elettrici | |
| Tensione operativa V cc (min.) | 10 V |
| Tensione operativa V cc (max.) | 50 V |
| Tensione di alimentazione della logica Vc (min.) | 10 V |
| Tensione di alimentazione della logica Vc (max.) | 10 V |
| Tensione max. in uscita (fattore * V cc) | 0.9 |
| Corrente max. in uscita I max | 15 A |
| Durata max. della corrente max. in uscita I max | 3 s |
| Corrente continuativa in uscita I cont | 5 A |
| Frequenza PWM dello stadio di potenza | 50 kHz |
| Frequenza regolatore PI di corrente | 25 kHz |
| Frequenza regolatore PI di velocità | 2.5 kHz |
| Frequenza regolatore PID di posizione | 2.5 kHz |
| Efficienza max. | 97 % |
| Velocità max. (DC) | 100000 rpm |
| Velocità max. (EC; 1 paio poli) commutazione trapezoidale | 100000 rpm |
| Velocità max. (EC; 1 paio poli) commutazione sinusoidale | 50000 rpm |
| Induttanza di fase integrata | 10 µH |
| Ingressi | |
| Segnali dei sensori Hall | H1, H2, H3 |
| Segnali encoder | A, A\, B, B\, I, I\ |
| Frequenza max. ingresso encoder | 6.2 MHz |
| Segnali del sensore | A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ |
| Ingressi digitali | 8 |
| Funzionalità degli ingressi digitali | limit switch, reference switch, general purpose, touch probe |
| Ingressi analogici | 2 |
| Risoluzione, intervallo, circuito | 12 bit, -10…+10 V, differenziale |
| Funzionalità degli ingressi analogici | General Purpose, Set Value Current, Set Value Velocity |
| DIP switch | 6 |
| Funzionalità dei DIP switch | DEV ID, I/O-Pegel (TTL, PLC) |
| Uscite | |
| Uscite digitali | 3 |
| Funzionalità delle uscite digitali | Freni di stazionamento, impiego universale |
| Uscite analogiche | 2 |
| Risoluzione, intervallo | 12 bit, -4…+4 V |
| Funzionalità delle uscite analogiche | General Purpose |
| Uscite in tensione | |
| Tensione alimentazione sensori Hall | Vedere "Tensione di alimentazione sensore" |
| Tensione alimentazione encoder | Vedere "Tensione di alimentazione sensore" |
| Tensione di alimentazione sensore | +5 VDC, max. 100 mA |
| Uscita tensione ausiliaria | +5 VDC, max. 145 mA |
| Interfacce | |
| USB (Full Speed) | Sì |
| EtherCAT | IEC 61158 Type 12 Slave |
| CoE (CAN application layer over EtherCAT) | CiA 402 |
| FoE (File transfer over EtherCAT) | Sì |
| Distributed Clocks Support | Sì |
| PDO mapping variabile | Sì |
| Visualizzazione | |
| Indicatore di stato "pronto" (Ready) | LED verde |
| Indicatore di stato "errore" (Error) | LED rosso |
| Indicatore di stato interfaccia di comunicazione | LED verde |
| Funzionalità di protezione | |
| Funzionalità di protezione | Limitazione di corrente, sovracorrente, sovratemperatura, sottotensione, sovratensione, transitori di tensione, corto circuito della linea del motore, perdita del segnale di feedback |
| Condizioni ambientali | |
| Temperatura min. - esercizio | -30 °C |
| Temperatura max. - esercizio | 25 °C |
| Temperatura – Range esteso | +25…+70 °C, Derating: -0.111 A/°C |
| Temperatura min. - stoccaggio | -40 °C |
| Temperatura max.- stoccaggio | 85 °C |
| Umidità min. (condensa non permessa) | 5 % |
| Umidità max. (condensa non permessa) | 90 % |
| Dati meccanici | |
| Peso | 76 g |
| Dimensioni (lunghezza) | 55 mm |
| Dimensioni (profondità) | 56.5 mm |
| Dimensioni (altezza) | 31.7 mm |
| Fissaggio | Fori di fissaggio per viti M2.5 |
| Software | |
| Programma di installazione | EPOS Setup |
| Graphical User Interface | EPOS Studio |
| Sistema operativo | Windows 11, 10 |
| Windows DLL per PC | 32/64 bit |
| Esempi di programmazione | MS Visual C#, MS Visual C++, MS Visual Basic, MS Visual Basic.NET, Borland C++, Borland Delphi, NI LabView, NI LabWindows/CVI |
| Linux Shared Object Library | X86 32-/64-bit, ARMv6/v7/v8 32-bit, ARMv8 64-bit |
| Esempio di programmazione | C++ |
| Funzioni | |
| CANopen Profile Position Mode | Sì |
| CANopen Profile Velocity Mode | Sì |
| CANopen Homing Mode | Sì |
| CANopen Cyclic Synchronuous Position | Sì |
| CANopen Cyclic Synchronuous Velocity | Sì |
| CANopen Cyclic Synchronuous Torque | Sì |
| Riferimento analogico | Sì |
| Feed forward regolazione di posizione | Sì |
| Feed forward regolazione di velocità | Sì |
| Regolazione di posizione e velocità (dual loop) | Sì |
| Quickstop | Sì |
| Abilitazione | Sì |
| Controllo di freni di stazionamento | Sì |
| STO (Safe Torque Off) | yes (not certified) |
| Impostazioni controllo avanzate | Sì |
Descrizione
EPOS4 Compact 50/5 EtherCAT è un comando di posizionamento dinamico pronto al collegamento dalla struttura compatta. Armonizzato con i motori DC con spazzole ed encoder e con i motori EC senza spazzole (BLDC) con sensori Hall ed encoder fino a 250 / 750 watt.Download
Software/firmware
Dati CAD (DXF, STP,....)
Pagine del catalogo
Manuali
-
Inglese
- EPOS4 Feature Chart (english, PDF 3 MB) Versione June 2025
- EPOS4 Firmware Specification (english, PDF 10 MB) Versione May 2025
- EPOS4 Communication Guide (english, PDF 5 MB) Versione March 2021
- EPOS4 Module-Compact 50/5 Hardware Reference (english, PDF 8 MB) Versione January 2025
- EPOS4 Application Notes Collection (english, PDF 18 MB) Versione April 2025
- EPOS4 Firmware Version Readme (english, PDF 529 KB) Versione May 2025
- EPOS4 ESI File (english, ZIP 1 MB) Versione 0180h